Alors que la date d’arrivée des véhicules autonomes sur les routes publiques approche à grands pas –certains constructeurs tels PSA parlent déjà d’une arrivée dès 2020-, la question de l’homologation des véhicules à conduite déléguée a très vite émergé. Du fait de la délégation de la responsabilité au véhicule et à l’absence potentielle de conducteur, l’homologation des véhicules autonomes pose de nombreux et nouveaux enjeux, que nous allons décrypter dans cet article.
Le véhicule autonome doit encore convaincre
A ce jour, le véhicule autonome doit convaincre et démontrer sa sécurité d‘abord aux autorités homologatrices, qui valideront sa conformité aux futurs réglementations techniques, et qui l’autoriseront à circuler, mais aussi auprès des populations. L’arrivée des véhicules autonomes devrait pourtant permettre une amélioration de la sécurité sur les routes : plus de 90% des accidents sont ainsi dus à une erreur humaine. Cette méfiance peut s’expliquer par le plaisir et la sensation de liberté que de nombreux conducteurs associent à la conduite, mais aussi parce que les conducteurs rechignent à confier leur vie aux mains d’une intelligence embarquée.
Or, en sus des freins évoqués précédemment, le moindre accident impliquant un véhicule autonome est immanquablement médiatisé. De ce fait, il est fondamental pour les industriels du secteur automobile de démontrer la fiabilité de leurs véhicules et que ces stéréotypes sont hors de propos. C’est justement là que les procédures de testing et d’homologation vont jouer un rôle fondamental pour rassurer et convaincre les autorités homologatrices comme les consommateurs de la fiabilité des véhicules autonomes.
De plus, l’affaire du Dieselgate a fait vaciller la confiance de nombreux citoyens européens dans les procédures d’homologation de leurs véhicules. Pour couper court aux polémiques nées de ces affaires impliquant le secteur automobile, le parlement européen a décidé de réagir en imposant une nouvelle reglementation et donc une nouvelle procédure d’homologation .
De leur côté, les véhicules autonomes ont encore tout à démontrer en matière d’essais. Comme le soulignait Laurent Benoit, le directeur de l’UTAC-CERAM, “le véhicule autonome demande un vrai travail de fond avec une très forte exigence de sécurité de fonctionnement“.
Partenaire des pouvoirs publics français, l’UTAC CERAM est l’organisme francais chargé de procéder aux essais de conformité des véhicules (et de leurs équipements) avec la réglementation.
Des moyens d’essais et une procédure d’homologation en cours de construction
Préalable à toute immatriculation et commercialisation d’un nouveau modèle, la phase de testing et d’homologation constitue une étape indispensable au déploiement d’un véhicule sur le marché. Cette procédure essentielle vise à vérifier que le véhicule respecte les règlementations techniques automobiles en vigueur en matière de sécurité, direction, freinage, mais aussi de signalisation et d’éclairage. Seul ce précieux sésame permet à un véhicule de circuler sur les routes publiques et les véhicules autonomes ne feront pas exception à la règle.
Point spécifique à l’Union Européenne, depuis 1990, l’homologation d’un véhicule par un Etat-membre via un service technique national (exemple comme l’UTAC en France) vaut pour l’ensemble de l’UE.
Un premier règlement devrait entrer en vigueur en avril 2018 et permettre d’homologuer deux premières fonctionnalités : le parking automatique et l’assistance sur autoroute. Un second règlement est attendu fin 2018-début 2019 et devrait permettre l’homologation de la conduite autonome sur autoroute. Ces règlements définissent des exigences en matière de sécurité, de manœuvres d’urgence, de temps de reprise en main, de driver monitoring et d’IHM etc. À noter que la nouvelle réglementation pourrait comprendre une sévérisation de l’audit de sureté de fonctionnement et l’ajout d’une boite noire comme pour les avions dans les véhicules. Elle prendra également en compte les conclusions des accidents intervenus ces derniers mois et ayant impliqués des véhicules semi-autonomes pour aller dans le sens d’une plus grande sécurité des usagers.
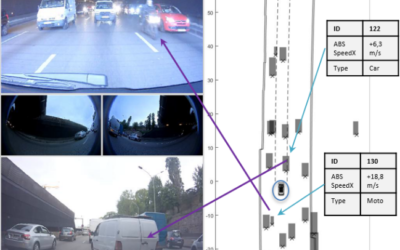
Comme pour tout véhicule, l’homologation des véhicules autonomes est précédée par plusieurs années d’essais et de mise au point au cours desquels ces derniers seront confrontés et testés dans un environnement complexe : routes encombrées, conditions météorologiques difficiles, présence de différents formats de véhicule, prise de décision dans des délais courts. On a ainsi vu l’émergence de nouvelles problématiques de test ces dernières années -méthodologies, scénarios, équipements d’essais-. Ces scénarios permettront de mettre au point les véhicules afin qu’ils respectent toutes les exigences de sécurité (réglementation technique automobile) et du code de la route (lois et Convention de Vienne).
Découvrir le testing et l’homologation du véhicule autonome
A la pointe de la recherche et de la formation sur le véhicule autonome, l’Institut de recherche Vedecom contribue aux travaux de réflexion et d’organisation des moyens d’essai et d’homologation des véhicules autonomes. Afin de partager ses travaux, Vedecom s’est associé à l’UTAC CERAM pour créer une formation dédiée à cette question.
Cette formation d’une journée et demie allie approche théorique et approche pratique : analyse de la réglementation existante et en cours de construction, procédures de réception des véhicules, protocoles et moyens d’essai, évaluations Euro NCAP et navettes autonomes. Cet atelier pratique vous permettra de visualiser plus concrètement les problématiques abordées dans le premier module et de découvrir comment seront testés et homologués les véhicules autonomes de demain.
Pour en savoir plus sur notre formation, consultez notre catalogue de formations.
*« véhicule à conduite déléguée » selon la loi de transition énergétique de 2015